Finally, we began exploring the effects of vibrations on the
closing of holes. We had to determine how we wanted to
mathematically represent the closing of the holes. We
decided to track two measures: the time both sides of the
fluids take to “touch” and the time they take to “fully
close”. Since our initial condition had the hole centered
around \(x=50\) , we defined the time to touch as the time
it takes for the minimum height to be found at the center.
We define the time to close as the time it takes for the
maximum and minimum height to have an absolute difference of
some tolerance. We chose a tolerance of \(0.05\).
We consider an initial condition of a film that reaches a
height of \(1 h_c\) with a film thickness of \(0.1 h_c\).
The film expands the \(100 x_c\) length. There is a hole
centered at \(x=50x_c\) with a width of \(40 x_c\). We want
to compare how long the hole takes to close for constant
gravity compared to when vibration is introduced. To
simulate constant gravity, we simply made \(\epsilon =0\)
and found that the times to touch and times to close were
\(628.9\) and \(1646.7 t_c\) respectively. However,
interesting things happened when we varied the values of
\(\epsilon\). Below is a table showing the different times
for changing values of \(\epsilon\).
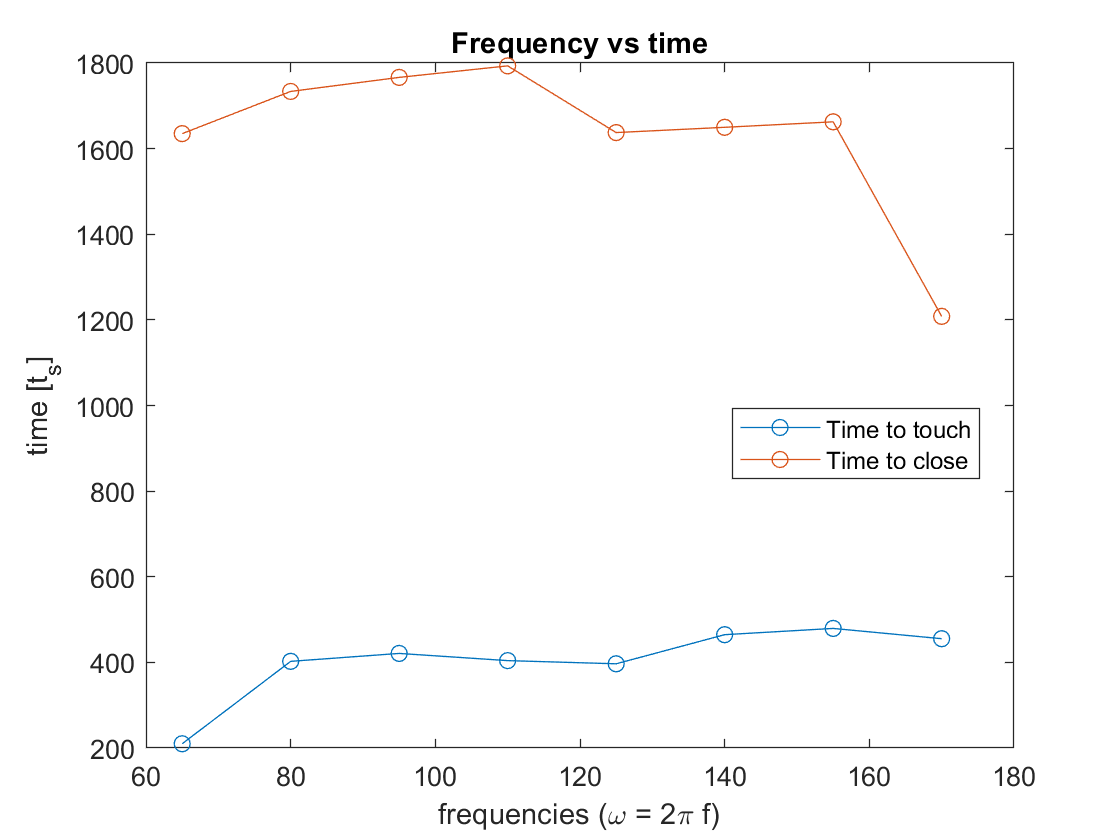
We chose the different values of \(\epsilon\) and
\(\omega\), based on our scales. Knowing that angular
frequency \(\omega=2 \pi f\) and since it does have a
dependency on time, we scaled it down with respect to
\(t_c\). That made \(\bar{\omega}=\omega \cdot t_c = 2 \pi f
\cdot t_c\) , where \(65\le f \le 170\) came from the
experimental results. Since gravity is being multiplied to
our amplitude-frequency equation \(1+\epsilon\sin(\omega
t)\), amplitude is being scaled down only by \(g\), so
\(\epsilon=\frac{a}{g}\), where a, our amplitude, also came
from the experimental results. We used \(0\le \epsilon \le
4\), as we had some significant numerical errors for higher
values of \(\epsilon\). Below there is a visual
representation of how time changes when the values of
amplitude and frequency increase.