2D Model
Methodology
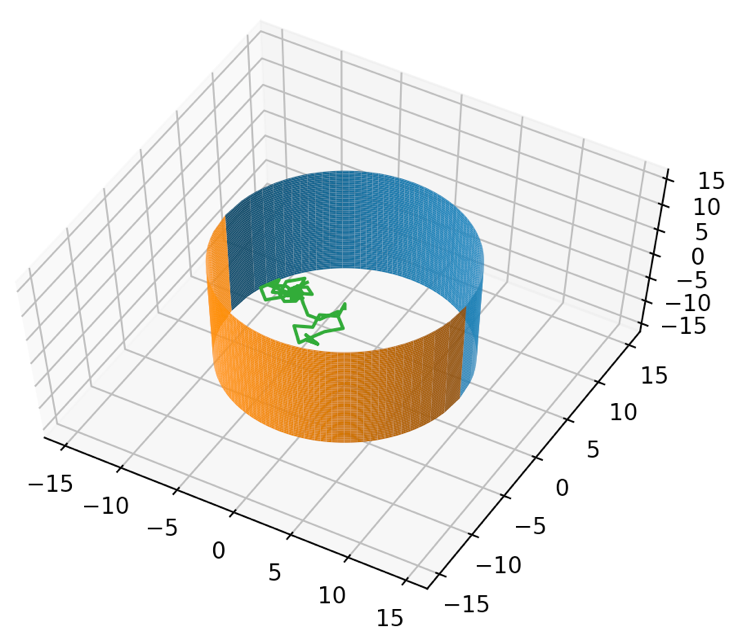
Our first objective was to simulate the deposition of a particle on a micro-filtration membrane, an algorithm known as
diffusion limited aggregation (DLA) was used. Diffusion limited aggregation is the process of placing a stationary seed
in a lattice, then releasing a second seed at a random location. At this point the second seed performs a random walk through
the lattice until it meets the stationary seed at which point it attaches to it and a new seed is added to again perform a random
walk. A lattice is to be initialized and used with a height of 200 grid points and a width of 100 grid points. As the particle
moves throughout the lattice it may come in contact with the membrane or other particles that have been attached to the membrane,
also known as an aggregate. When the particles touch the membrane or aggregate, it remains in the position depending on an
additional parameter, the sticking probability for the membrane (SPM) and the sticking probability for the aggregate (SPA).
See Figure 3.1 for an illustration of the membrane.
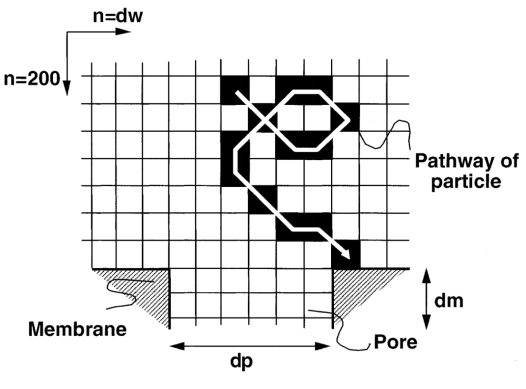
Fig 3.1
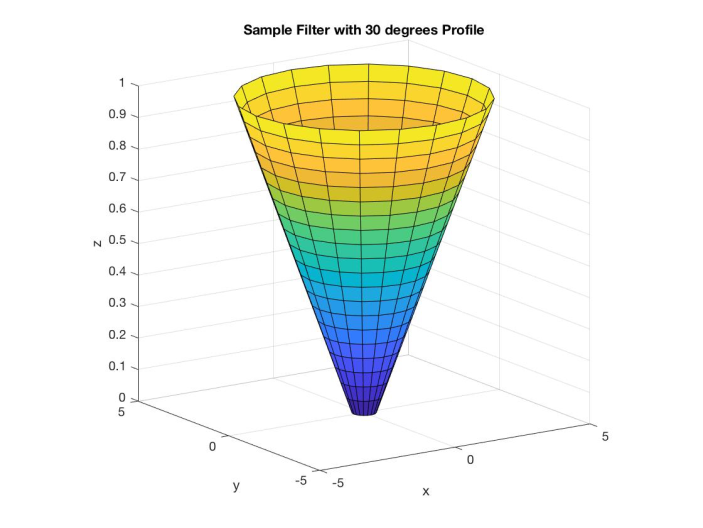
Generating Membrane Profile
We are particularly interested in morphologies with pore radii that decrease linearly as you traverse the length of the membrane from the pore opening to closing. As such we refer to $A(X,T)$ as the radius of the pore as a function of X (the vertical direction) and T time units where the number of starting particles is our measure for time. According to Darcy`s Model for flow through a porous medium [4] the local membrane resistance is proportional to ${A(X,0)}^{-4}$ where $A(X,0) = aX+b$. This implies that the average membrane resistance (after substituting $u = aX +b$ ) is given by: $$r(t) = \int_{0}^{1} \frac{\,dx}{A(X,0)^4} = \int_{0}^{1} \frac{\,dx}{{(aX+b)}^4} = \frac{1}{a} \int_{b}^{a+b} \frac{\,du}{u^4} \\ = \frac{1}{3a} \frac{1}{u^3} \Big|_{a+b}^b = \frac{1}{3a} \Big ( \frac{{(a+b)}^3 - b^3}{b^3{(a+b)}^3} \Big ) = 1.5$$
We were able to formulate various pairs of
coefficients, a and b, for a range of angles. Using those coefficients
we will alter the simulation methodology to generate different
membrane profiles. This will be done by implementing the formulation
of the membrane as a function of a and b. To begin we must first
discretize the geometries of our simulation. The coefficients
generated will form a membrane with height of 1, ranging from X = 0 to
X = 1, however, for our simulation, we need to generate the membrane
for a wider range of X- values. See Figures 3.3 and 3.4
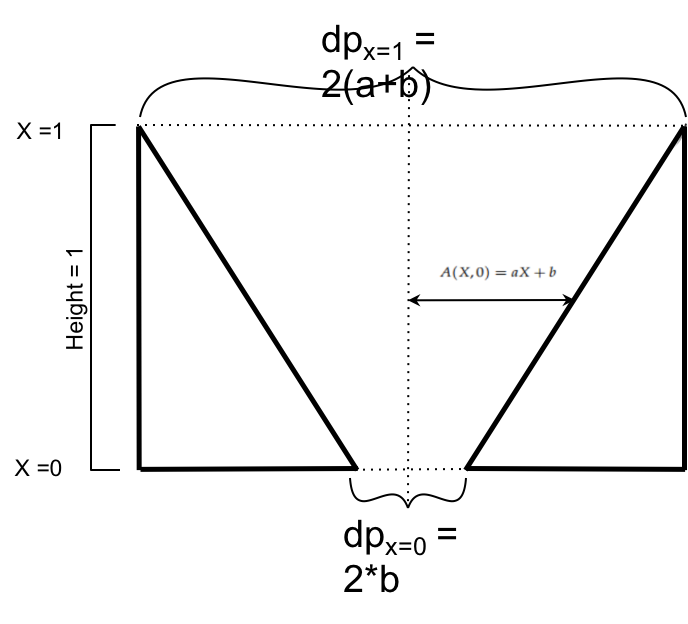
Fig 3.3
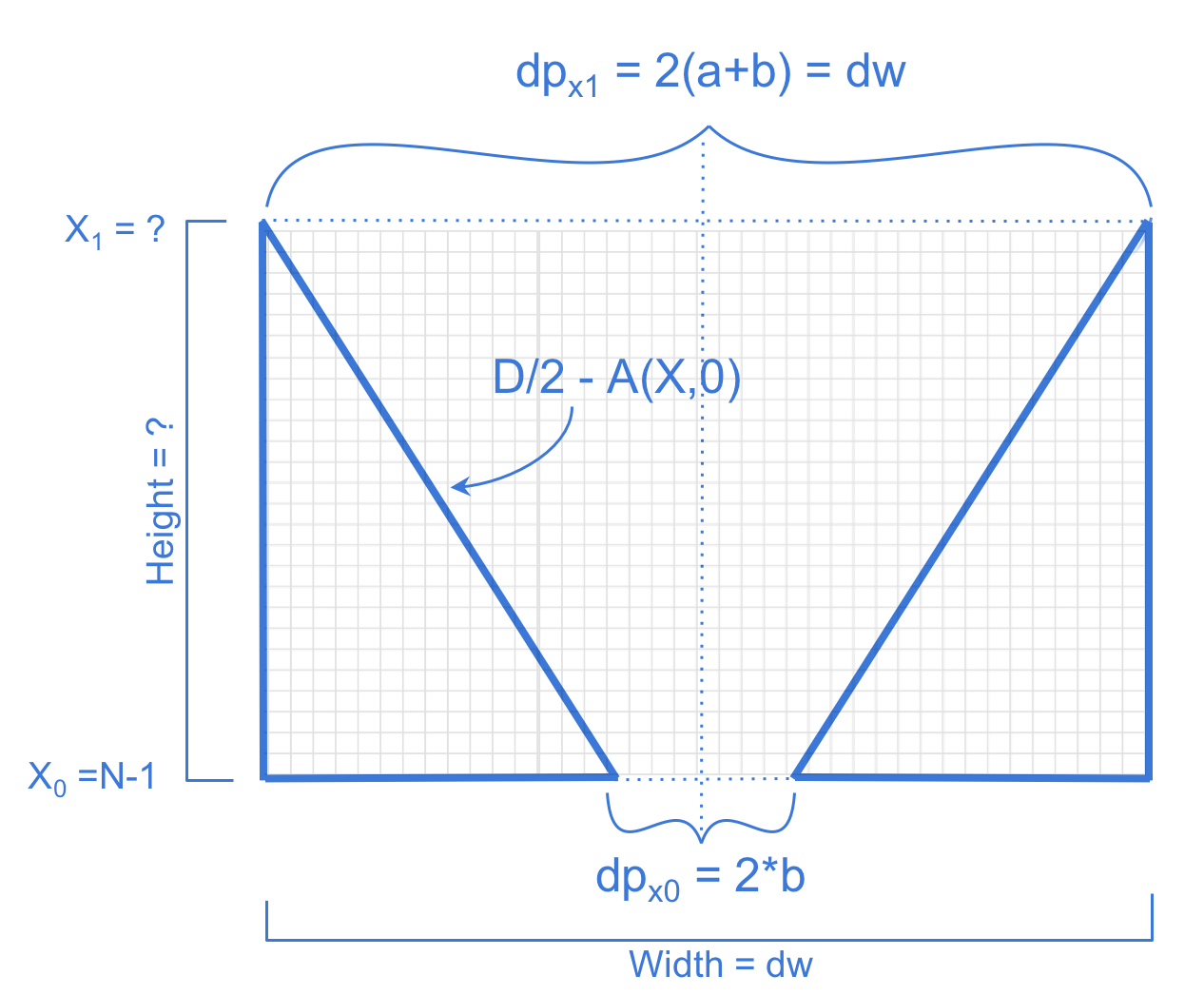
Fig 3.4
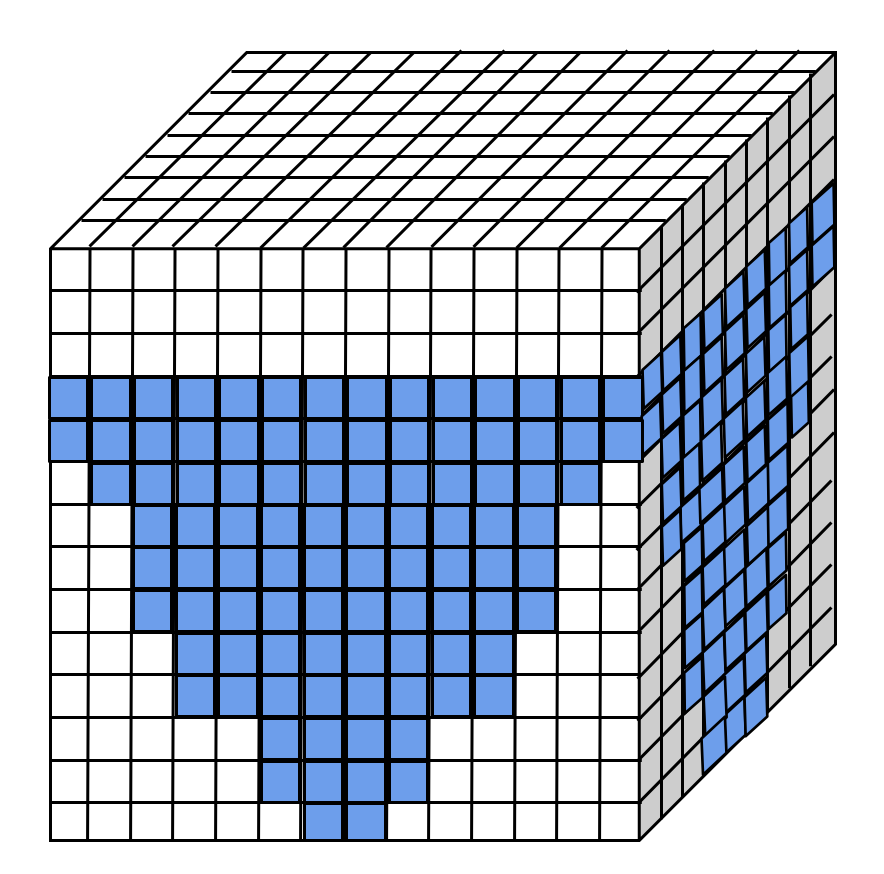
A STAR Search Algorithm
To determine if a pore is clogged, our problem is reduced to a path-finding algorithm; i.e. if we're able to find a path from the top
of the lattice to the bottom (through the membrane) then we can conclude that the pore is not clogged.
The A* (A STAR) search algorithm is a path finding algorithm that implements heuristic search to efficiently find a path with the least
cost [5]. The cost of a node is denoted by $f(n) = g(n) + h(n)$,
where $g(n)$ is the cost from the start node to current node n, and $h(n)$ is the heuristic estimate or estimated cost from current node n
to the final node. We estimate the h value using the Chebyshev distance with $$h(n) = \text{max(|current.x - goal.x|, |current.y - goal.y|)}$$
X,Y denote their respective X and Y positions on the lattice, and $f(n)$ estimates the lowest total cost of any solution through node n. At each point,
the node with the lowest f value is chosen for expansion, and the process repeats itself.
There are a maximum of 8 possible directions in which we can search (in 2D space: up, down, left, right, up-left,
up-right, down-left down-right). This yields a branching factor (max possible paths) of 8. The running time of any
path-finding algorithm is $O(b^d)$ where b is the branching factor (possible paths) and d is the distance from start to end (pore width).
Typically, this results in an exponential run time because each possible path will be fully explored in search of the
optimal path. However, the heuristic algorithm like A* looks at the most likely neighboring nodes that would result in a path
based on the $f$ value detailed above. In in our case, we are only interested in finding if a pore is blocked or in other words,
if a path does not exist. Existence of a path means there is no blocking which is found if a path is found from through the pore.
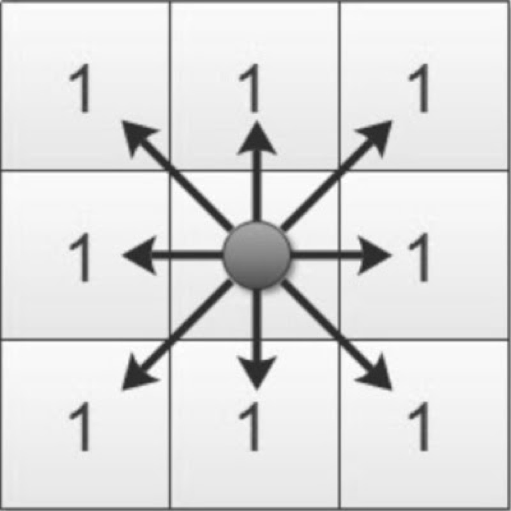
Fig 3.5
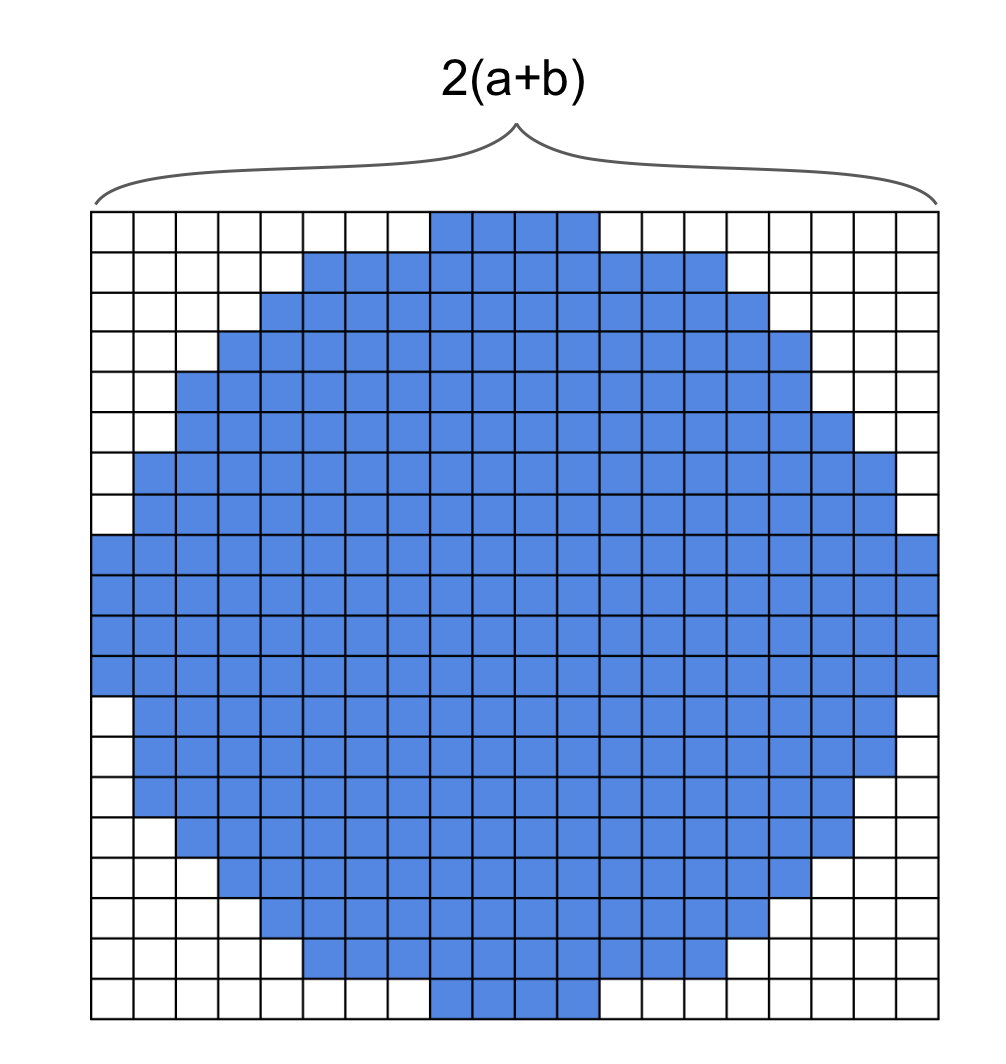
Normal Probability Distribution
To better examine the performance of our filter, we'd like for the particles to be forced through the membrane
(using advection flow) via a normal distribution (instead of a typical uniform distribution). Consider the
bottom half of a semi-circle with radius $\pi/2$ and centered at the origin. We use this semi-circle to represent a
continuous analogous function of the discrete movement of our particle. We'd like to partition the gaussian
distribution into 5 distinct regions over an interval $(\pi/2 , \pi/2)$ with each region respectively representing one
of the 5 possible directions the particle may travel to. This gaussian distribution will be centered around
$\mu = 0$ but with $\sigma$ unknown.
Suppose $X ~ N(\mu,\sigma^2)$ has a normal distribution and lies within the interval $X \in (a,b), -\infty \le a < b \le \infty$.
Then $X$ conditional on $a < X < b$ has a truncated normal distribution. Its probability, $f$, for $a \le x \le b$, is
given by
\begin{equation}
f(x;\mu,\sigma,a,b) = \frac{\phi(\frac{x -
\mu}{\sigma})}{\sigma\left(\Phi(\frac{b - \mu}{\sigma}) - \Phi(\frac{a
- \mu}{\sigma})\right) }
\end{equation}
Here,
$\phi(\xi)=\frac{1}{\sqrt{2 \pi}}\exp\left(-\frac{1}{2}\xi^2\right)$
is the probability density function of the standard normal
distribution and $\Phi(\cdot)$ is its cumulative distribution
function.
$\Phi(x)=\frac{1}{2} \left( 1+\operatorname{erf}(x/\sqrt{2}) \right)$.
Using a brute-force method with $a= -\frac{\pi}{2}\, b=
\frac{\pi}{2}$ to numerically integrate all possible values $\sigma$
and $\mu=0$ for $f(x; \mu, \sigma, a, b)$; if the absolute value of
the integral minus one is less than some tolerance epsilon, then
accept that value for $\sigma$. We can therefore conclude that $\sigma
\approx 0.9$ and the probabilities are
\begin{equation}
\int_{-\frac{\pi}{2} + \frac{k\pi}{5}}^{-\frac{\pi}{2} +
\frac{(k+1)\pi}{5}} f(x;\mu,\sigma,a,b) \, dx
\end{equation}
for k=0,1,2,3,4 to move west, southwest, south, southeast, and east
respectively.
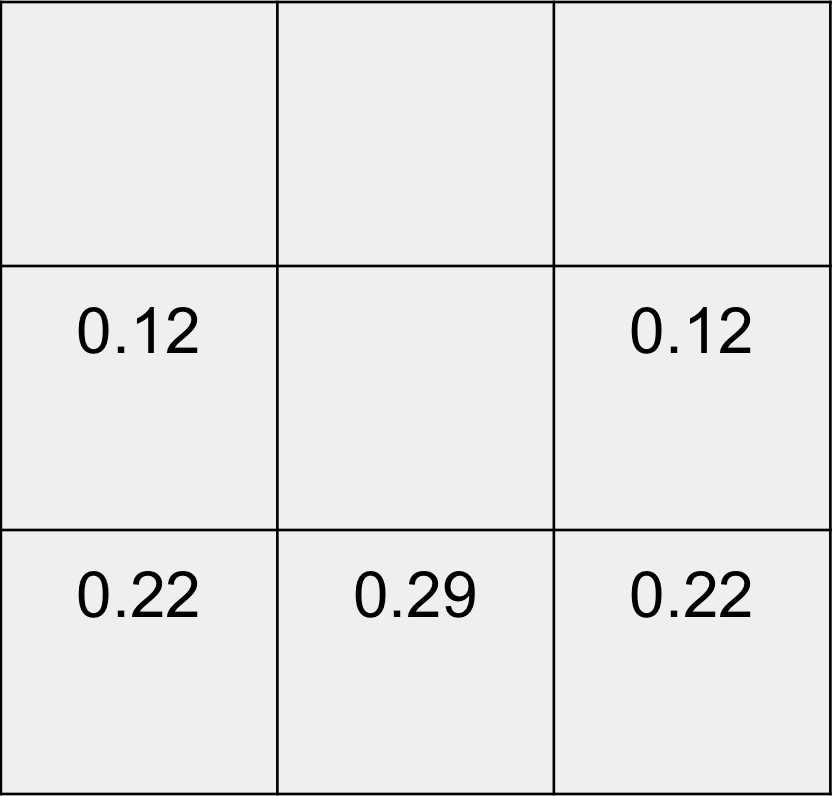
Fig 4.1 Normal Distribution
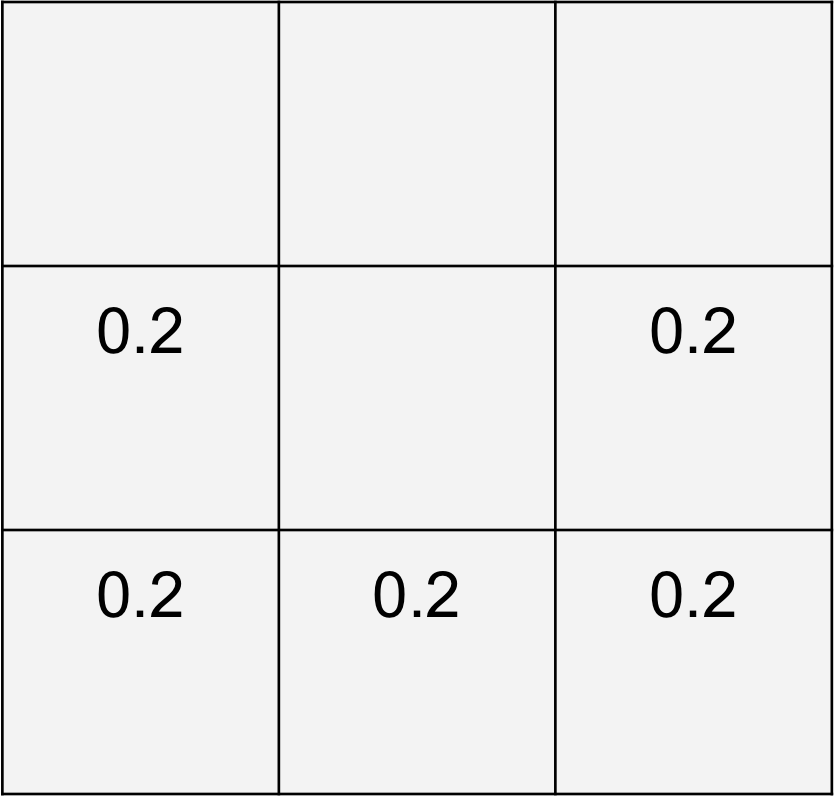
Fig 4.2 Uniform Distribution